近日🕺🏿,由科技部指导、科技部火炬中心主办、辽宁省科技厅承办🙍🏼、东北科技大市场实施的第七届中国创新挑战赛(辽宁)现场赛成功举办🐗♉️。现场赛沈阳🧑🏼🤝🧑🏼、丹东两地联合举办、选手以线上比拼的形式参赛❤️。评委专家🧎🏻♂️、参赛选手及观众人数达2000余人。

北国·辽宁日报对此次比赛进行了报道
经过线上比拼,杏耀平台娱乐 -【杏耀游戏乐园】带您体验不一样的精彩!李玉峰教授团队获得团体总分第一名👇🏿,夺得“金钥匙奖”!
本届挑战赛通过揭榜比拼,发挥“产学研用联盟”优势,开展“新兴产业赛”,重点围绕新一代信息技术🚌🙆、高端装备制造两大我省重点领域开展需求征集🧝🏿♀️。通过走访调研、现场沟通、专家咨询、服务机构推荐等方式,深度挖掘包括央企🧑🏿🎤、上市公司、新型研发机构💓、瞪羚企业等技术需求400余项,最终面向全社会公开发布技术需求100项。
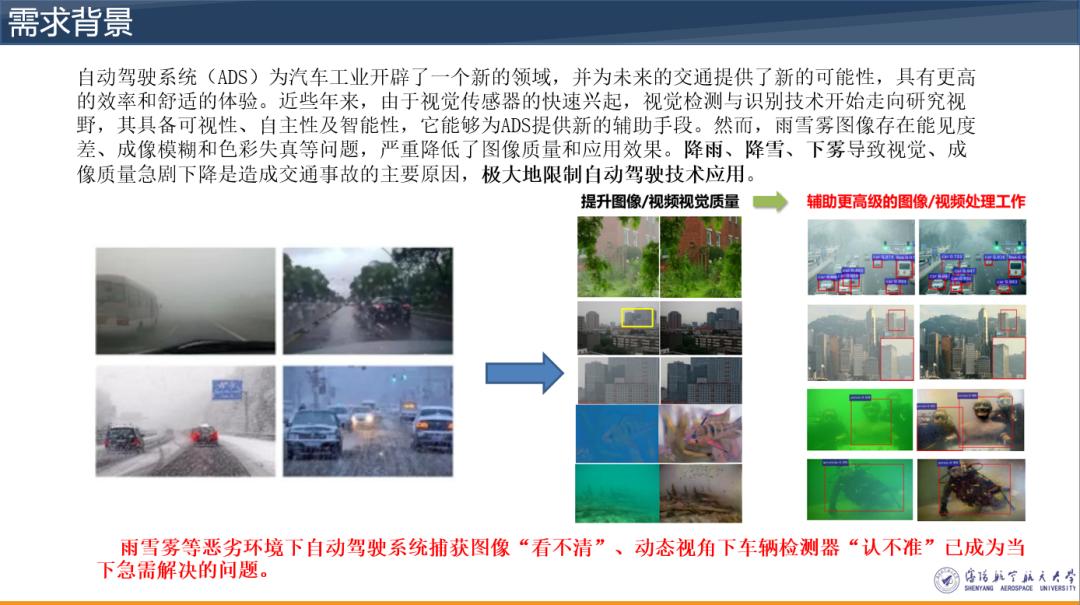
自动驾驶系统(ADS)为汽车工业开辟了一个新的领域🖐🏿,并为未来的交通提供了新的可能性💥,具有更高的效率和舒适的体验🙎♀️。近些年来,由于视觉传感器的快速兴起👱🏽,视觉检测与识别技术开始走向研究视野👨👦,其具备可视性、自主性及智能性,它能够为ADS提供新的辅助手段。然而🫕,雨雪雾图像存在能见度差、成像模糊和色彩失真等问题,严重降低了图像质量和应用效果♡。降雨、降雪、下雾导致视觉、成像质量急剧下降是造成交通事故的主要原因🐏,极大地限制自动驾驶技术应用🕺。为了让ADS继续向前推进到下一个时代,自动驾驶汽车需要更好的来应对雨雪雾天气下的视觉问题。那么如何解决雨雪雾恶劣环境下ADS精准的视觉检测与识别问题,成为了下一大科学研究的热门。
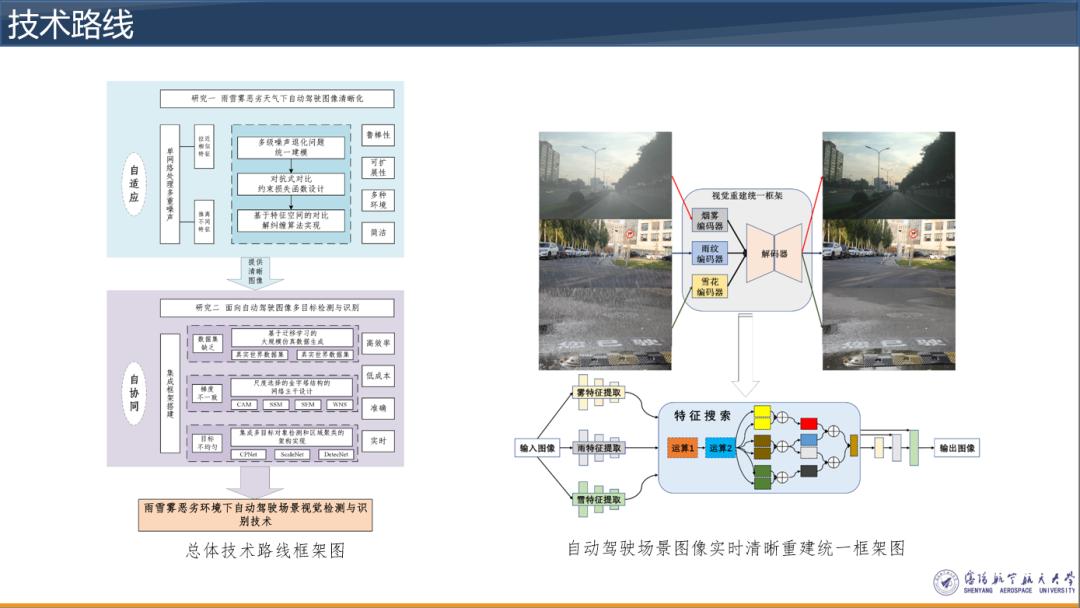
面向雨雪雾恶劣环境下ADS精准的视觉检测与识别技术的需求,开展雨雪雾恶劣环境下ADS捕获图像数据实施清晰重建与面向自动驾驶场景的目标检测与识别两项关键技术研究。分别解决雨雪雾恶劣环境下ADS捕获图像“看不清”、动态视角下车辆检测器“认不准”的难题。其中📋,研究运用计算机视觉技术🧎🏻♀️➡️,分别针对雨雪雾不同退化因素👰🏽♂️,通过探索有效的神经结构策略,通过整合本地信息和外部感知信息来编解码特征空间,从而得到重建的清晰图像。再通过恢复的清晰图像,构建大规模数据集🐫,开发一种适用于ADS的高效率且低成本的网络,从而提升恶劣天气环境下自动驾驶的安全性能🏌🏼♀️。针对上述关键问题🩶,探索协同优化的新思路🦹🏿♂️,对新一代ADS清晰感知与识别定位技术的发展演进提供理论方法和技术支撑,促进基础研究成果走向应用🤵。


初审初校丨宋兴
复审复校丨李朔
终审终校丨李江


